
About Me

Robotics & Computer Vision Engineer
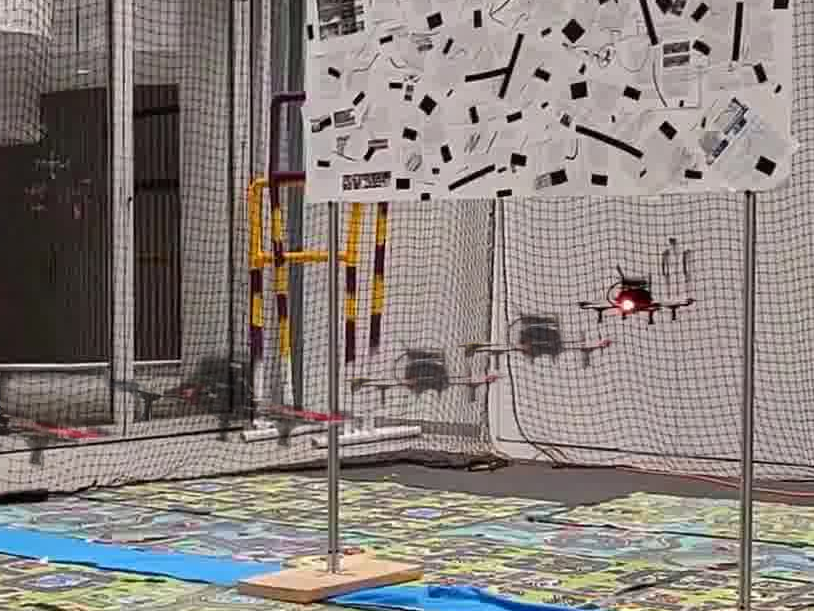
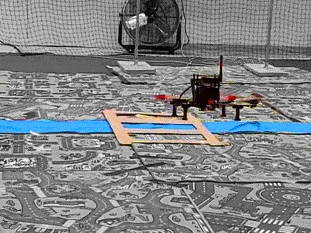
I am a second-year PhD student in Robotic Workers Lab at the University of Nevada, Reno advised by Prof. Christos Papachristos. My research focuses on active and interactive perception for autonomous robots. I am also involved in aerial robotics research, focusing particularly on the computer vision aspect of creating resilient migrtory MAV systems.
Prior to pursing my PhD, I completed my Masters in Robotics from the University of Maryland, College Park (UMD). I was a member of the Perception and Robotics Group (PRG), advised by Prof. Yiannis Aloimonos where I worked on autonomous vision-based navigation for quadrotors.
I’m originally from Delhi, India. Prior to joining UMD, I worked as a Research Associate with Dr P.B. Sujit and Dr Sanjit Kaul on self-driving car project in Indian Urban scenario at IIIT-Delhi. Before that, I completed my Bachelors of Technology in Electrical Engineering at Bharati Vidyapeeth’s College of Engineering (BVP), GGSIPU. At BVP, I worked with Asst. Prof. Gargi Mishra on locomotion of legged robots.
In my spare time, I like to fly my own custom-built FPV drone and occasionally go on hikes.
Projects
Here are a few projects that I completed in my graduate and undergraduate years. My projects pertain to different areas like computer vision, quadrotors and mobile robots. For more information, visit my Github page .
- All
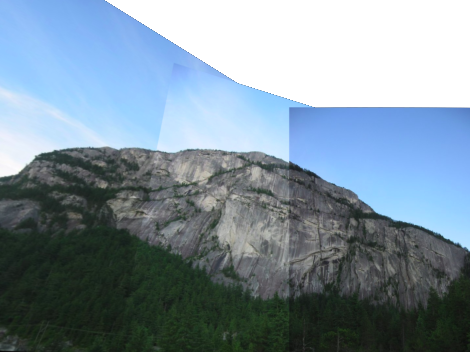
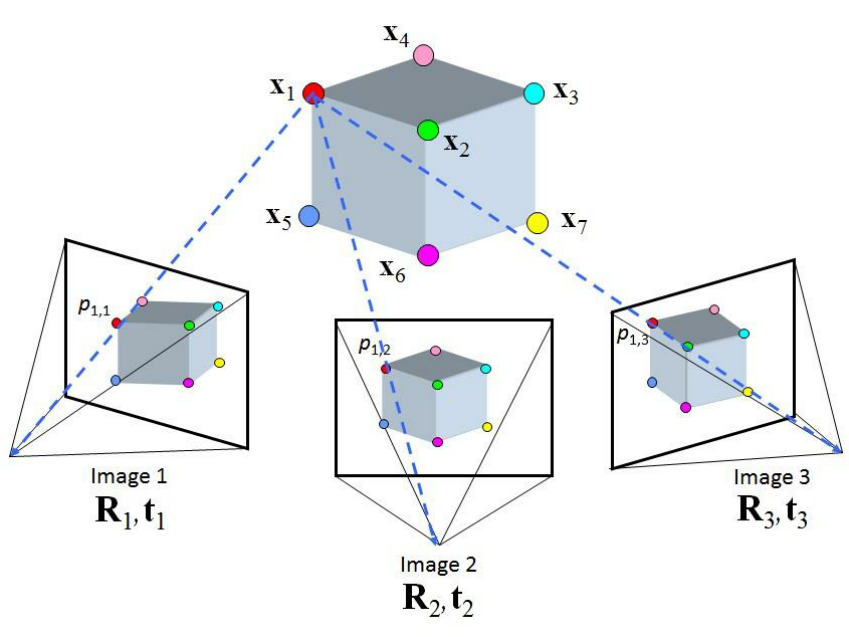
- Computer Vision
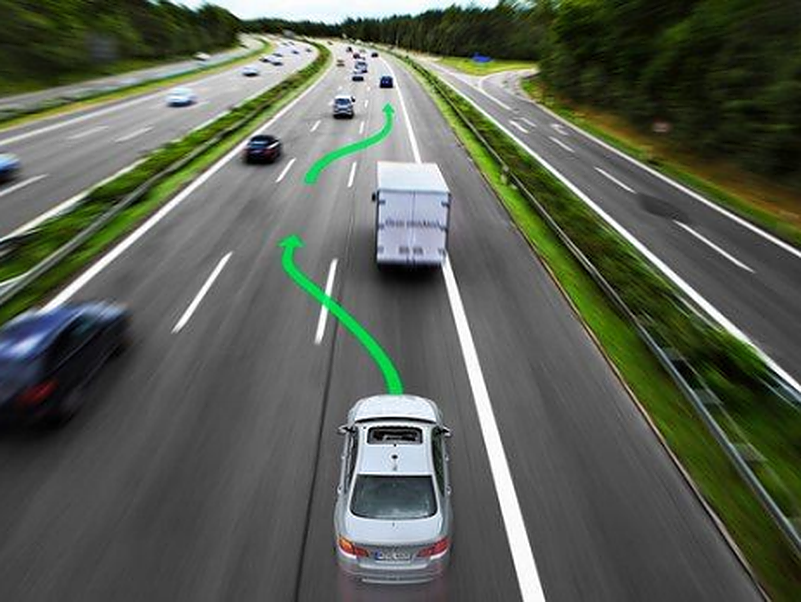
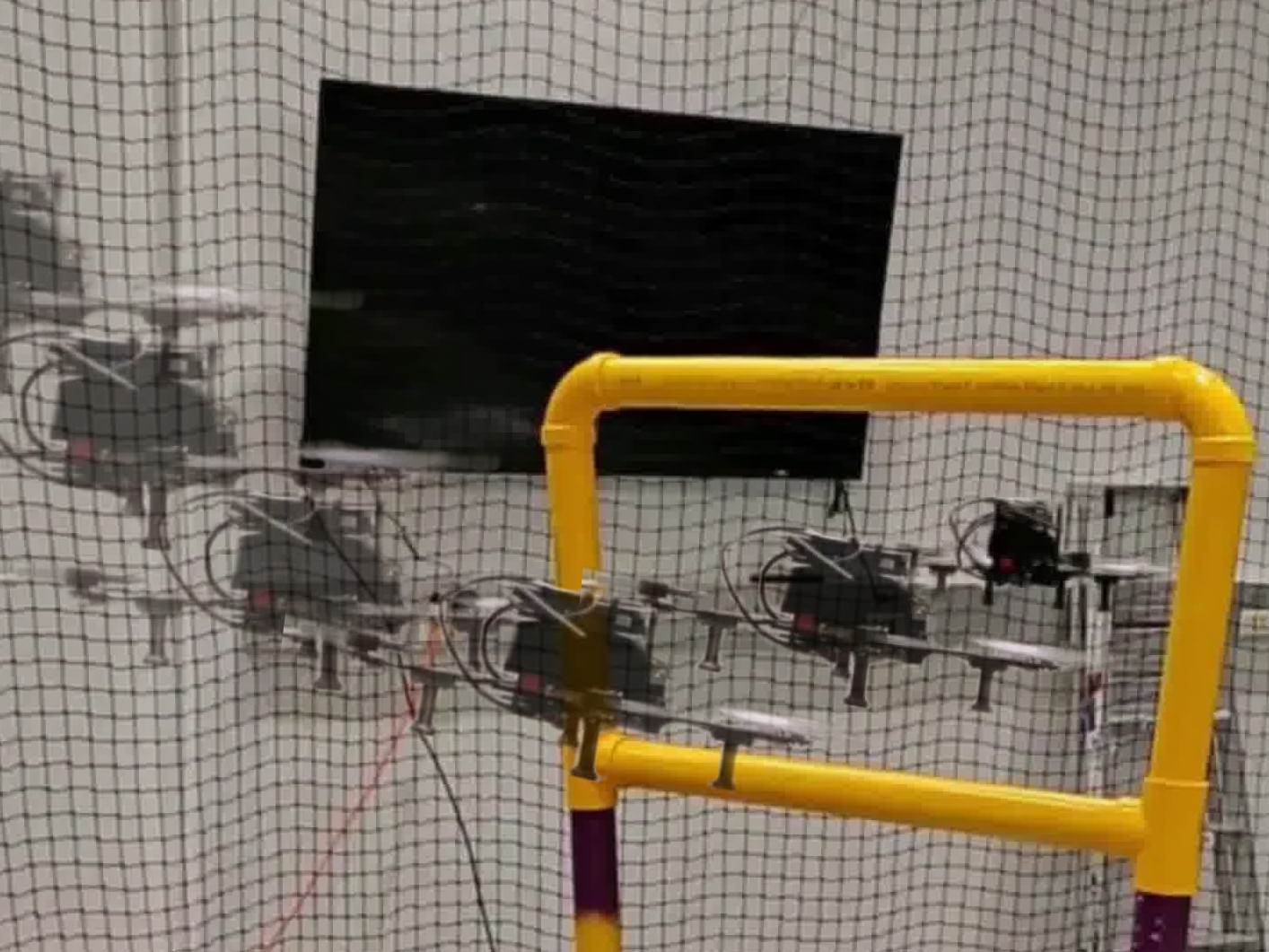
- Aerial Robotics
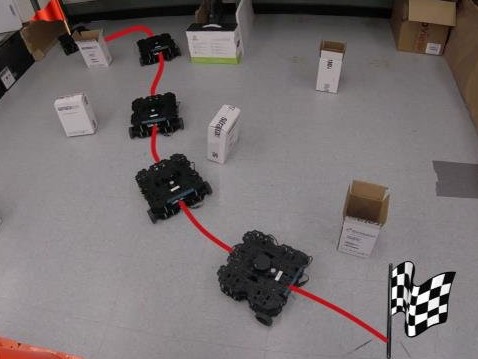
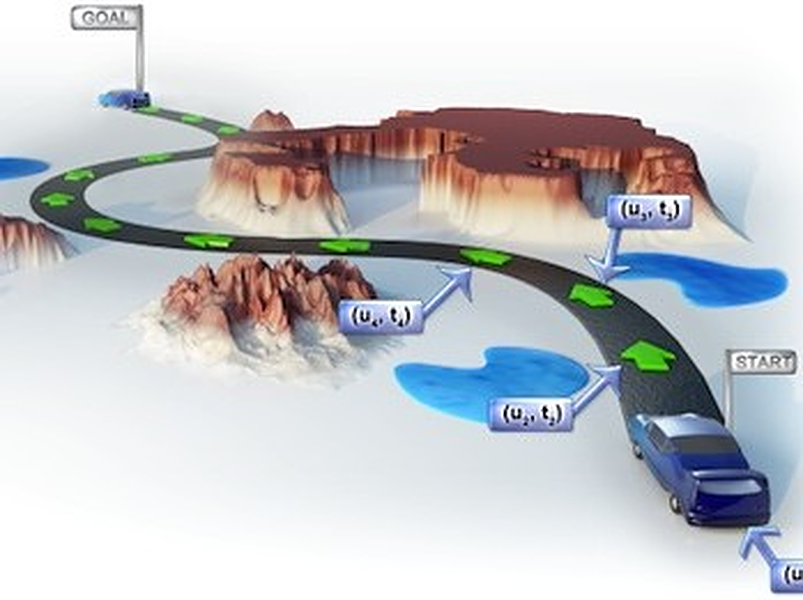
- Path Planning




Resume
Contact
Location:
1555 N Sierra St, Reno, NV 89503
Email:
prateeka@nevada.unr.edu